
Each reference source has its own acceleration and braking ramps. There are also the stop ramps (quick-stop ramp), according to the CiA402 standard. The ramp functions are only effective in certain system states. The required settings can be selected from the dialog box. Clicking the "Error/Error reactions" button directly accesses the dialog box for the error reactions.
In torque control (TCON) mode too, the programmed ramps are executed in rpm on disabling the control, the reference, Halt, Quickstop and Error.
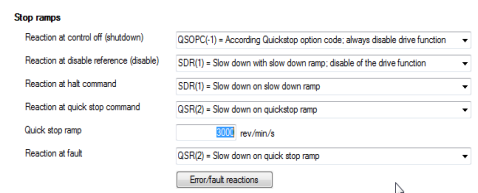
Bild: "Stop ramp" dialog box
If the drive needs to be shut down as rapidly as possible due to a malfunction, it must be run down to speed zero on an appropriate ramp.
The "Quickstop" function brakes an ongoing movement differently from the normal braking ramp. The drive controller is in the “"Quickstop" system state. This state can be quit during or after braking, depending on the status of the quick-stop command and the respective reaction.
Parameters
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2218 | MPRO_402_QuickStop_OC | Quickstop option code |
| (0) | POFF(0) = Disable power stage/drive function | Disable power stages. The drive coasts to a stop |
| (1) | SDR(1) = Slow down on slowdown ramp | The drive brakes with the deceleration ramp, then the power stage is disabled. |
| (2) | QSR(2) = Slow down on quickstop ramp | Braking with quick-stop ramp, then the power stage is disabled. |
| (3) | CLIM(3) = Slow down on current limit | Braking with max. dynamism at current limit. The speed reference value is set equal to 0, then the power stage is disabled. |
| (4) | - | - |
| (5) | SDR_QS(5) = Slow down on slowdown ramp and stay in quickstop | Braking with programmed deceleration ramp. The drive remains in the quick-stop state, current is applied to the axis at zero speed. 1) |
| (6) | QSR_QS(6) = Slowdown on quickstop ramp and stay in quickstop | Braking with quick-stop ramp. The drive remains in the quick-stop state, current is applied to the axis at speed 0. 1) |
| (7) | CLIM_QS(7) = Slow down on current limit and stay in quickstop | Braking with max. dynamism at the current limit, the speed reference is set equal to 0. The drive remains in the quick-stop state, current is applied to the axis at speed 0. 1) |
| (8) | - | - |
| 1)Transition to the "Ready for start" state is only possible by resetting the quick-stop request. In the "Quick-stop" state cancelling the "Start closed-loop control/drive" signal has no effect as long as the quick-stop request is not reset as well. | ||
Tabelle: Reaction to quick-stop
The "shutdown option code" parameter determines which action is to be executed at the transition from "Operation enable" to "Ready to Switch on"
(state machine state 5 to 3).
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2219 | MPRO_402_Shutdown_OC | Shutdown option code |
| (-1) | QSOPC(-1) = According Quickstop option code | In the event of a Shutdown command the stop variant selected in In the event of a Shutdown command the stop variant selected in "Reaction to quick-stop" MPRO_402_QuickStop_OC. |
| (0) | POFF(0) = Disable power stage/drive function | Disable power stages; the drive coasts to a stop |
| (1) | SDR(1) = Slow down with slow down ramp; disable of the drive function | The drive brakes with the parameterized deceleration ramp down to speed zero. Then the holding brake, if fitted, engages according to its parameter setting. |
Tabelle: Reaction to control shutdown
Reaction to "disable Operation"
The "disable operation option code" parameter determines which action is to be executed at the transition from "Operation enable" to "Switched on" (state machine state 5 to 4).
Parameters
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2220 | MPRO_402_DisableOp_OC | Disable Operation option code |
| (0) | POFF(0) = Disable power stage/drive function | Disable power stages |
| (1) | SDR(1) = Slow down with slow down ramp; disable of the drive function |
The drive brakes with the deceleration ramp, then the power stage is disabled. |
Tabelle: Reaction to "Reference disable"
Reaction to "Halt" / "Halt Operation"
The "Halt" command interrupts a movement. The drive remains in the "Operation enable" state. When the "Halt" command is cancelled the interrupted movement is completed.
Parameters
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2221 | MPRO_402_Halt_OC | Halt option code |
| (1) | SDR(1) = Slow down on slow down ramp | The drive brakes with the deceleration ramp |
| (2) | QSR(2) = Slow down on slow quickstop ramp | Braking with emergency stop ramp |
| (3) | CLIM(3) = Slow down on current limit | Braking with max. dynamism at current limit. The speed reference is set equal to 0. |
| (4) | - | - |
Tabelle: Reaction to "Halt"
Reaction to "Fault" / "FaultReaction"
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2222 | MPRO_402_FaultReaction_OC | FaultReaction option code |
| (1) | SDR(1) = Disabled drive, motor is free to rotate | Block power stage |
| (2) | QSR(2) = Slow down on slow down ramp | The drive brakes with the deceleration ramp |
| (3) | CLIM(3) = Slow down on current limit | Braking with max. dynamism at current limit. The speed reference is set equal to 0 |
| (4) | - | - |
Tabelle: Reaction to "Fault"
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P2242 | MPRO_402_Quickstop_Dec_OC | Quickstop Deceleration option code |
Tabelle: "Quickstop" ramp
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE