
In the overload range, saturation effects reduce the inductance of many motors. As a result, the current controller optimized to the rated current may oscillate or become unstable. In this case the gain of the current controller should be adapted to the load case by way of four interpolation points. The values for the interpolation points are entered in the dialog box as a percentage of the rated current.
On the left are the inductance values, and on the right the values for the overload (> 100% of rated current).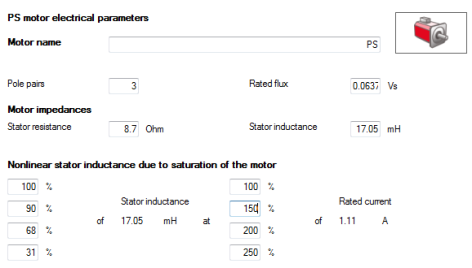
Bild: Electrical parameters of PS motors
Scaling of q-inductance "L" in [%]


|
P 0472 (0-3) MOT_LsigDiff | Scaling of q-stator inductance in [%]; interpolation points 0 to 3. |

|
P 0472 (4-7) MOT_LsigDiff | Scaling of rated current in [%]; interpolation points 4 to 7. |
Bild: Scaling of q-inductance L in [%]

|
NOTE: Between the interpolation points the scaling factor is interpolated in linear mode. The current scaling of the inductance is displayed in the scope variable "74_Is_ActVal" . |
In the overload range the output-side torque is reduced due to rising losses (iron/copper losses) .
This behaviour can be compensated by parameter P 0479 MOT_TorqueSat.
Parameters
| P. no. | Parameter name | Function |
|---|---|---|
| P 0479 | MOT_TorqueSat | Motor torque as a function of the current |
| (0)-(4) | Torque in [Nm]; interpolation points 0 to 4. | |
| (5)-(9) | Current in [A]; interpolation points 5 to 9. |
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE