The higher the dynamism of the speed controller, the more dynamically the position controller can be set and the tracking error minimized. The variables for the pre-control of the speed and position controller are additionally determined either from the change in reference values or alternatively are already calculated and outputted by the motion control. The time-related values for the position, speed and torque are transmitted to the drive control.
If the dynamic change in these values is within the limits which the drive is able to follow dynamically, the load on the controllers is significantly reduced. In order to improve the dynamism of the position controller, the following dialog box is provided to optimize the speed and acceleration pre-control.
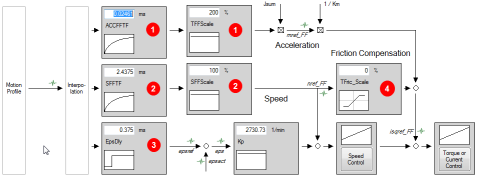
Bild: Pre-control dialog box
| No. | Function |
|---|---|

|
Delay time and scaling for torque pre-control |

|
Delay time and scaling for speed pre-control |

|
Delay time for position pre-control |

|
Scaling of friction torque |
Tabelle: Legend to pre-control dialog box

|
NOTE: When a standard motor data set is read-in, the position controller gain is also adopted. The setting equates to a controller with a medium rigidity. In the default setting no smoothing is selected! |
The pre-control of the acceleration torque relieves the strain on the speed controller and optimizes the control response of the drive. To pre-control the acceleration torque, the mass inertia reduced to the motor shaft must be known.
f the parameter for the overall mass inertia of the system P 1516 SCD_Jsum has a value ≠ 0, that value will be automatically used to pre-control the acceleration torque.
The pre-control of the speed reference is preset by default to 100% via parameter
P 0375 CON_IP_SFF_Scale. This value should not be changed.
The acceleration torque pre-control can be optimized with
P 0376 CON_IP_TFF_Scale. Reducing this reduces the pre-control value; conversely, increasing this value also increases the pre-control value. The position tracking error can be further reduced by predictive torque and speed pre-control – that is, in advance of the position reference setting. Owing to the time-discrete mode of operation of the control circuits and the limited dynamism of the current control circuit, this prediction is necessary to prevent the individual control circuits from oscillating against one another. Prediction in pre-control is achieved by retarding the references for speed and position controllers.
Parameters for setting the pre-control
| P. no. | Parameter name | Function |
|---|---|---|
| P 0360 | CON_PCON_KP | Position controller gain |
| P 0372 | CON_IP_SFFTF | Prediction (delay time) for speed controller pre-control |
| P 0374 | CON_IP_EpsDly | Prediction (delay time) for position controller pre-control |
| P 0375 | CON_IP_SFFScale | Speed controller pre-control scaling factor |
| P 0376 | CON_IP_TFFScale | Torque controller pre-control scaling factor |
| P 0378 | CON_IP_ACC_FFTF | Prediction (delay time) for torque controller pre-control |
| P 0386 | CON_SCON_TFric | Scaling factor for friction compensation Friction torque compensation.htm |
| P1516 | SCD_Jsum | Reduced mass inertia |
Tabelle: Parameters for setting the pre-control

|
ATTENTION:
|
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE