
With the reference table up to 16 reference values can be defined. In the process, the drive moves to its targets in conformance to the respective driving sets. Depending on the selected control mode, each reference in the table assigned a speed, acceleration and deceleration value. The table reference values can be used in any control mode.
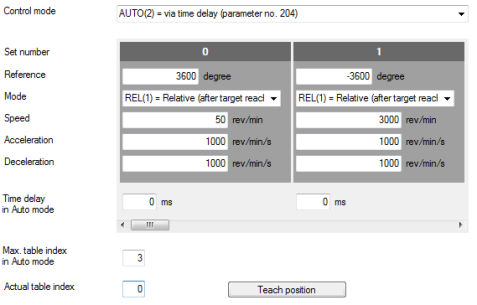
Bild: Reference table
The references must be made available in user-defined distance units. This is done by way of the "Scaling" motion profile.
In "Infinite positioning" mode the speed can be specified signed. It is limited by parameter P 0328 CON_SCON_SMax.
The acceleration values for starting and braking can be parameterized irrespective of each other. The input must not be zero.
The driving jobs from zero up to the value set in "Number of follow-up jobs to be processed" are continuously processed. When the driving set entered in
P 0206 MPRO_TAB_MaxIdx is complete, the first data set restarts. For this, P 0205 MPRO_TAB_Modemust be set to = "AUTO". Processing is only stopped by removing the start contact. The positioning mode P 0203 MPRO_TAB_PMode = "REL at once" aborts a current position driving set and moves, as from the current position, to the new reference.
Parameters
|
P. no. |
Parameter name / Setting |
Function |
|---|---|---|
| P 0193 | MPRO_TAB_TAcc | Acceleration ramp (torque) |
| P 0194 | MPRO_TAB_TDec | Braking ramp (torque) |
| P 0195 | MPRO_TAB_TRef | Reference (torque) |
| P 0196 | MPRO_TAB_SAcc | Acceleration ramp (speed) |
| P 0197 | MPRO_TAB_SDec | Braking ramp (speed) |
| P 0198 | MPRO_TAB_SRef | Reference (speed) |
| P 0199 | MPRO_TAB_PAcc | Acceleration ramp (position) |
| P 0200 | MPRO_TAB_PDec | Braking ramp (position) |
| P 0201 | MPRO_TAB_PSpd | Speed (position) |
| P 0202 | MPRO_TAB_PPos | Position reference |
| P 0203 | MPRO_TAB_PMode | Positioning mode |
| (0) | ABS(0) | Absolute positioning |
| (1) | REL(1) | Relative positioning after target position reached |
| (2) | REL at once(2) | The current driving job is interrupted and a new pending job is directly accepted and executed. |
| (3) | SPEED(3) | Infinite motion, SPD (infinite driving job): If a table value is set to SPD, an infinite driving job is transmitted. If a table value with the setting ABS or REL is additionally selected, the infinite job is quit and the newly selected table value is approached from the current position. |
| P 0204 | MPRO_TAB_Wait time | In case of follow-up jobs: Wait time until execution of the next driving job. |
| P 0205 | MPRO_TAB_Mode | Control source |
| (0) | PARA (0) | Selection of a table value via P 0207 MPRO_TAB_ActIdx |
| (1) | TERM(1) | Selection of a table value via the digital inputs |
| (2) | AUTO (2) | Automatic processing of follow-up driving jobs. The number of driving jobs entered in parameter P 0206 MPRO_Tab_MaxIdx is processed in sequence. This operation is repeated until the drive is stopped or the table is disabled. |
| (3) | BUS(3) | Selection of a table value via PROFIBIUS. No other field bus systems are implemented. |
| P 0206 | MPRO_Tab_MaxIdx | The number of driving jobs set here is processed in sequence. This operation is repeated until the drive is stopped or the table is disabled. |
| P 0207 | MPRO_TAB_ActIdx | Display of the currently selected driving job. If parameter P 0205 MPRO_TAB_Modeis set to = Para(0), a driving set can be entered and approached directly. |
Tabelle: Parameters – table references
Vorgehensweise: Enabling table values:
Settings for reference input via table values
| Activation | Setting | Function |
|---|---|---|
| Actuation via digital inputs | Input ISDxx = TBEN |
Enable a selected driving set. |
| Actuation via digital inputs | Input ISDxx = TAB0 to TAB3 | The binary significance (20, 21, 22 , 23) results from the TABx assignment. The setting TAB0 has the lowest significance (20) and TAB3 the highest (23). A high level on the digital input activates the corresponding driving set. |
| Triggering via field bus system | Enable "Execute driving job" bit. | Enable a selected driving set. The selection of a new driving job always interrupts an ongoing positioning and the follow-up job logic. |
| Triggering via field bus system | "Activate follow-up job" bit | The binary significance (20, 21, 22 , 23) results from the TABx assignment of the control word. The setting TAB0 has the lowest significance (20) and TAB3 the highest (23). |
Tabelle: Activation of table references
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE