
An optional holding brake built-in to motor provides protection against unwanted motion when the power is cut and in case of error. If the brake is mounted on the axis mechanism and not directly on the shaft, note that undesirably severe torsional forces may occur on sudden engagement of the brake.
The output P 0125 MPRO_OUTPUT_FS_Motor_Brake should be used in conjunction with a motor brake. On this output the current is explicitly monitored and wire break monitoring can be enabled. The brake function can also be used in the other digital outputs, though without current and wire break monitoring.
If the output is set to BRAKE(2), the brake can be configured by way of the option field. The brake response can be adapted to the requirements of the application as shown in the following illustration and using the parameters listed. This function can be used in both speed as well as position controlled operation. The wire break monitor P 0748 MON_MotorbrkGuard can be enabled and disabled.
Parameter P 0148 ENMO is used to set the time for enabling a motor switch ("Timeout Ready to switch on").
Motor brake
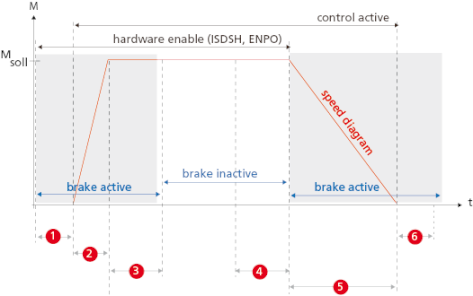
Bild: Brake response
| Number | P. no. | Function |
|---|---|---|
 + +  |
P 0148 | ENMO: Enable and disable motor switch |

|
P 0215 | torque rise time: Torque rise time |

|
P 0213 |
break lift time |

|
P 0214 | break close time Brake close time |

|
P 0216 | torque fade time Torque fade time |
| 7 | P 0218 |
constant initial torque |
| 8 | P 0217 |
factor of application of last torque |
Tabelle: Brake settings
Parameters
| P. no. | Parameter name Setting | Function |
|---|---|---|
| P 0125 | MPRO_OUTPUT_FS_MOTOR_BREAK | Output for use of a motor brake. If no brake is used, the output can be used for a vast variety of other functions. |
| (2) | BRAKE | Setting for use of a brake |
| P 0147 | MPRO_DRVCOM_EPCHK | Switch-on condition (hardware switch) |
| (0) | No Check | Hardware enable "ENPO" is switched via the "ENMO" function. |
| (1) | Check | ENPO must be switched via a digital input. |
| P 0148 |
MPRO_DRVCOM_ENMO [0-65535 ms] |
The timer "ENMO" (Enable motor contactor) generates an On/Off-delay of the motor contactor and thus of the power stage. The effect is active when setting and resetting the "START" command and in case of error. The parameter is in the "Motion profile" subject area. |
| P 0213 |
MPRO_BRK_LiftTime [0-10000 ms] |
"Brake release time" is the mechanically dictated opening time of the brake. An applied reference will only be activated when this timer has elapsed. |
| P 0214 |
MPRO_CloseTime [0-10000 ms] |
After cancellation of the "START" command the "Brake close time" starts. When it ends the "Brake closed" signal is sent. In the event of an error, the brake engages immediately without any closure time. |
| P 0215 |
MPRO_RiseTime [0-10000 ms] |
The "Torque rise time" is the rise of the ramp to build up the reference braking torque "Mref". |
| P 0216 |
MPRO_BRK_FadeTime [0-10000 ms] |
The "torque fade time" is the descending ramp to reduce the reference torque "Mref" to 0. |
| P 0217 |
MPRO_BRK_LastTorqFact [0-100%] |
If the load changes, it is advisable to apploy factor 1-100% to the last actual torque stored (0% = function off). |
| P 0218 | MPRO_BRK_StartTorq |
If the moving load always remains constant, "Mref" is set by way of parameter Mref =lasttorque * lasttorque-factor+ starttorque When setting the Lasttorque factor = 0 according to the formula, only the Starttorque setting is used. If Starttorque is set to 0, the Lasttorque is used. On first operation there is no Lasttorque though. In this case StartTorque is set to 0 and the LastTorque factor unequal to 0 and then the control is started. |
| P 0219 | MPRO_BRK_LastTorq | Display parameter of last recorded torque Scaling via P 0217 MPRO_BRK_LastTorq |
| P 0220 | MPRO_BRK Lock | Only for testing. Manual setting of this parameter causes the brake to engage. |
Tabelle: Brake settings

|
NOTE: Please check the settings of the stop ramps if use of a holding brake is specified. |
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE