
The torque controller is executed as a PI controller. The gain (P-component) and the integral-action time (I-component) of the individual controllers are programmable.
In order to optimize the current control loop, two rectangular reference steps are preset. The object of the optimization is a current controller with moderate dynamism and the following values:
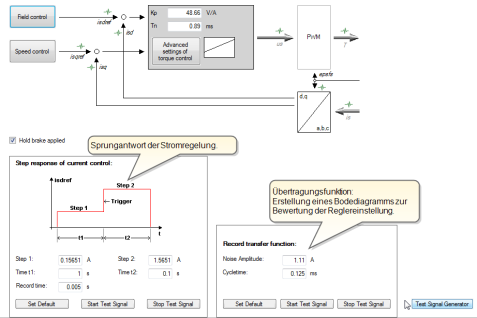
Bild: Optimization of speed control
Vorgehensweise: Current controller optimization
The faster the actual value approaches the setpoint (reference), the more dynamic is the controller setting. During settling, the overshoot of the actual value should be no more than 5-10% of the reference (guide value).


Bild: Current controller optimization
Creating the transfer function
The oscilloscope automatically records the amount and phase response of the controller according to the controller settings. This produces an initial estimate of the control quality.
To determine the transfer function the noise amplitude (motor rated current) and the sampling time (default 0.125 ms) must be specified. Click the "Start Test Signal" button.
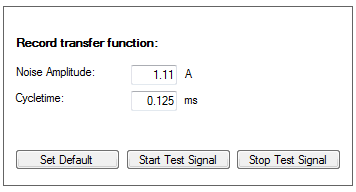
Bild: Noise amplitude, sampling time
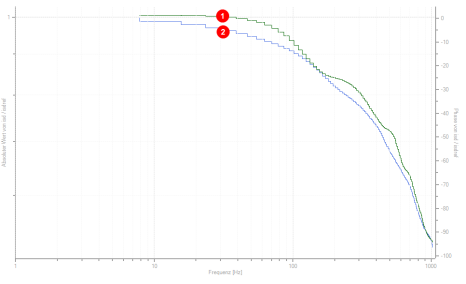
Bild: Current controller transfer function

|
Green curve = Amount Y-axis left = Absolute value of isd/isdref |

|
Blue curve = Phase response Y-axis right = Phase response Isd / isdref |
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE