
In the motion profile settings are made relating to closed-loop control, reference input, profile, interpolation, limitation and reference filtering. The reference filters are initialized only after the control has been re-enabled or by a device restart.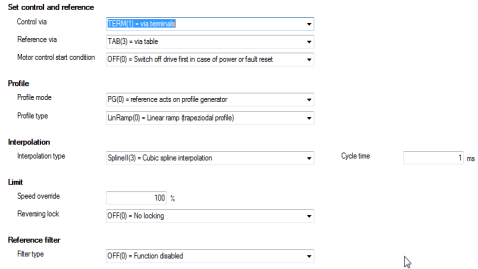
Bild: Basic setting dialog box
Parameters
| P. no. | Parameter name/ Settings |
Function |
|---|---|---|
| P 0144 | MPRO_DRVCOM_Auto_start | Autostart function |
| (0) | Off | Normal operation: The drive is stopped by cancelling the start condition. |
| (1) | ON | The drive starts immediately when the initialization is complete. |
| P 0159 | MPRO_CTRL_SEL | |
| (0) | OFF | No control location selected |
| (1) | TERM | Control via terminal |
| (2) | PARA | Control via parameter |
| (3) | Off | Not defined |
| (4) | PLC | Control via IEC 61131 (iPLC) |
| (5) | CiA 402 |
Control via CiA402/ EtherCat |
| (6) | SERCOS II | Control via SERCOS II |
| (7) | PROFIBUS | Control via PROFIBUS |
| (8) | VARAN | Control via VARAN |
| (9) | SERCOS III | Control via SERCOS III |
| (10) | TWIN | Control via TWINsync |
| P 0165 | MPRO_REF_SEL | Selection of reference source |
| (0) | OFF | No reference selected |
| (1) | ANA0 | Reference via analog input ISA0 |
| (2) | ANA1 | Reference via analog input ISA1 |
| (3) | TAB | Reference via table values |
| (4) | PLC | Reference via PLC basic library |
| (5) | PLC | Reference via PLC open library |
| (6) | PARA | Reference via parameter |
| (7) | CiA 402 | Reference via CiA 402 |
| (8) | SERCOS | Reference via SERCOS |
| (9) | PROFIBUS | Reference via PROFIBUS |
| (10) | VARAN | Reference via VARAN |
| (11) | TWIN | Reference via TWINsync |
| P 0166 | MPRO_Ref_JTime | Smoothing time |
| P 0167 | MPRO_Ref_OVR | Speed override: Reference is percentage-weighted. |
| P 0301 | Con_Ref_Mode | Selection of interpolation mode |
| (0) | PG | PG(0): The reference is generated by the Profile Generator. The internal generation is executed at a sampling time of 125 ms. |
| (1) | IP | IP(1): The reference input leads directly to the fine interpolator. Adaptation of the sampling time between the PLC and the drive controller is essential. |
| P 0306 | CON_IpRefTS | Adaptation of sampling time between external PLC and drive controller. |
| P 0335 | CON_SCON_DirLock | Reversing lock for speed controller |
| P2243 | MPRO_402_Motion_ProfType | Profile type PG mode |
| (0) | LinRamp | Linear ramp |
| (1) | not used | Vacant |
| (2) | not used | Vacant |
| (3) | JerkLim | Jerk-limited ramp: Effect with smoothing time set in P 0166. |
| P 0370 | CON_IP |
Selection of interpolation method |
| (0) | NoIp | No interpolation |
| (1) | Lin | Linear interpolation |
| (2) | SplneExtFF | Interpolation with external pre-control value |
| (3) | Spline | Cubic spline interpolation |
| (4) | NonIPSpline | Cubic spline approximation |
| (5) | Cos | Cosine interpolation |
| P 0743 | MON_UsrPosDiffMax | Limitation of reference position change |
| P 0755 | MPRO_FG_RefPosFilData |
Reference filter Only active in IP mode |
| (0) | Off | No filter active |
| (1) | PT1 | PT1 filter with time constant |
| (2) | PT2 | PT2 filter with time constant |
| P 0756 | MPRO_FG_RefPosFilData | Filter time constant |
| (0) | RefFil_TimeConst | PT1/PT2 Filter time constant |
| (1) | RefFil_DampConst | Damping constant |
Tabelle: Parameters to set motion profile
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE